
[프로젝트] 룸바 A* & PDDL 드라이버
요약
- 2019.03.01. ~ 2019.06.30
- 팀 프로젝트
- 기여
- 격자 공간에서 다수의 로봇들의 서로 충돌하지 않고, 각자의 목표 위치로 이동하기 위한 서버 개발
- c++, ROS, raspberry pi 3
- 데모 영상
- 프로젝트 repository
프로젝트 설명
아마존 창고로봇 영상을 보고 시작한 프로젝트입니다. 좁은 환경에서 다수의 로봇이 목적을 달성하기 위해 최적화된 움직임을 수행하것이 최종 목표입니다. 저를 포함한 6명의 팀원들을 A* 알고리즘과 PDDL 알고리즘을 사용해서 위 목표를 구현하였습니다.
워크플로우
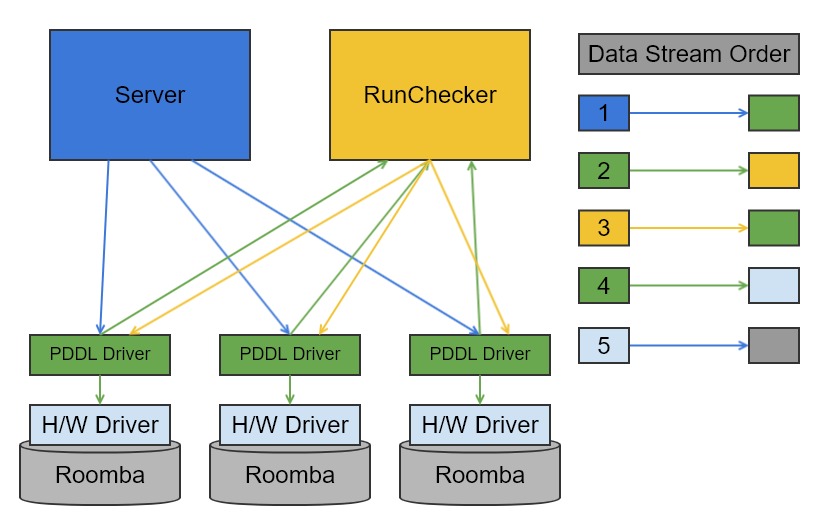
- 서버에서 PDDL 알고리즘을 수행합니다.
- rosnodejs와 ROS msg 통신을 사용해서 서버로부터 결과를 받아옵니다. 이때 서버에서 연산되는 결과는 각 룸바가 수행해야하는 연속된 명령을 순차적으로 보내줍니다.
- 드라이버는 각 룸바가 수행해야하는 명령이 도착하면 runChecker에게 신호를 보냅니다.
- RunChecker가 모든 룸바에게 명령을 전달받았다는 신호를 받으면 모든 룸바에게 명령을 수행하라는 신호를 보냅니다.
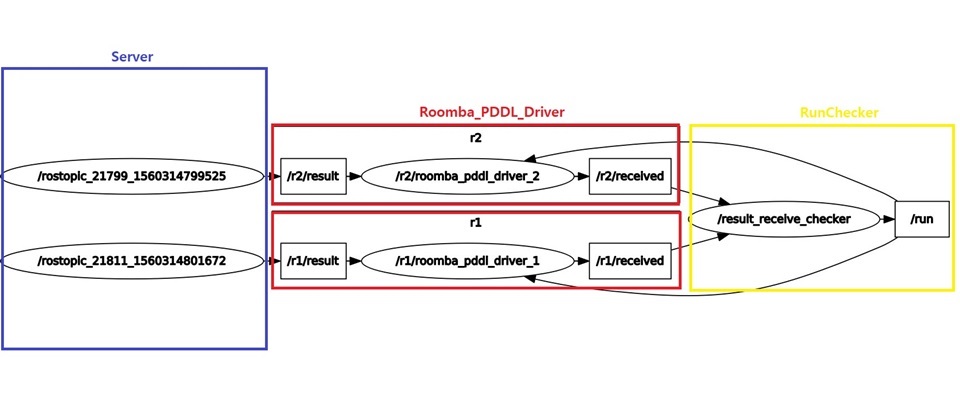
위 그림은 두 대의 룸바를 사용할 때 rqt_graph를 그려본 모습입니다.
- 파란색 : 서버로부터 각 룸바가 수행해야 하는 명령을 ROS msg 통신으로 보내줍니다.
- 빨간색 : 각 룸바의 rddl_driver가 메시지를 수신하면 runchecker에게 신호를 보냅니다.
- 노란색 : runchecker가 모든 rddl_driver로부터 메시지를 받았으면 각자의 명령을 수행하라는 /run 메시지를 보냅니다.
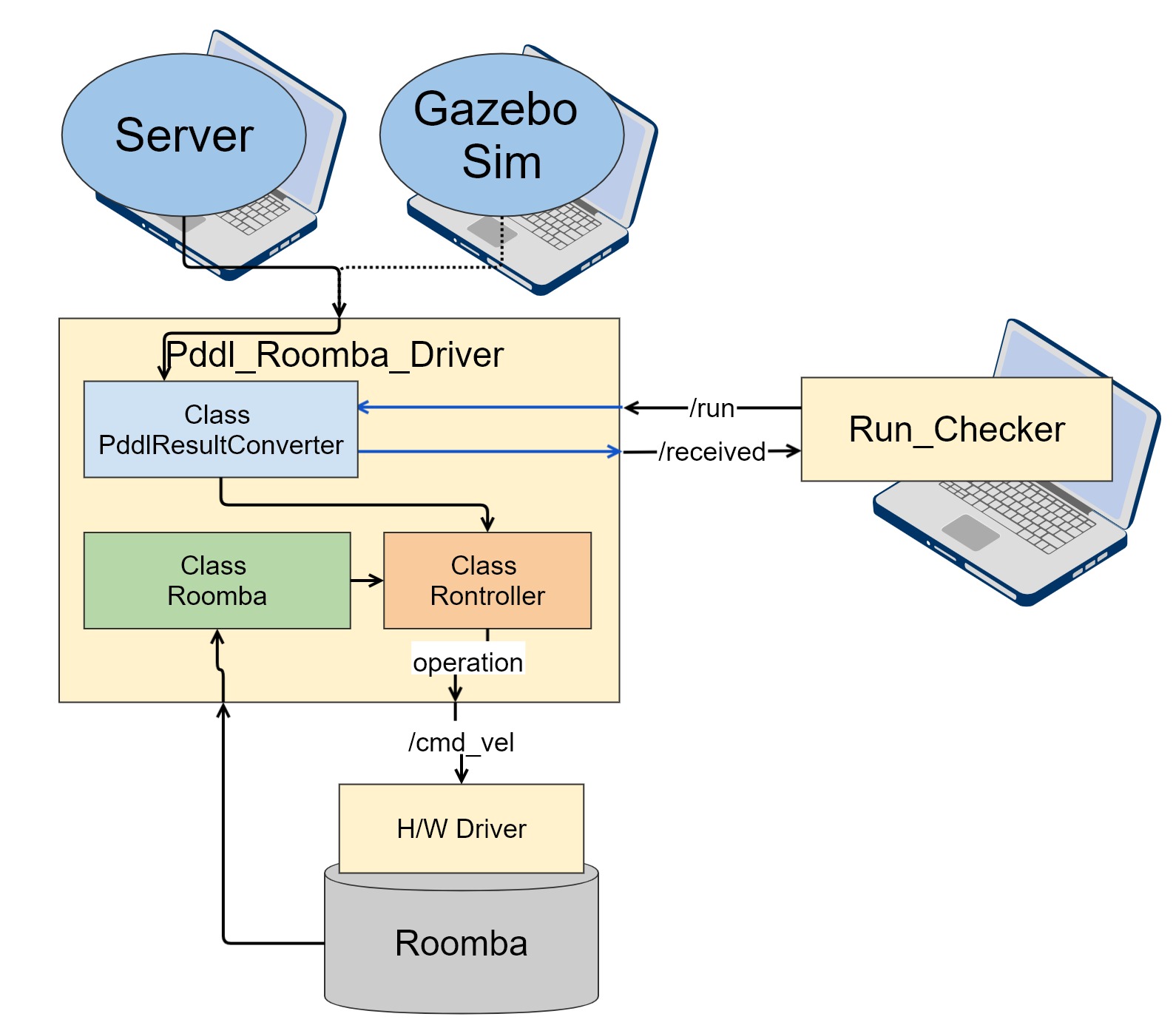
각각의 pddl_driver는 룸바에 연결된 라즈베이파이에서 동작하며, RunChecker는 독립적인 컴퓨터에서 수행됩니다.
프로젝트 Demo 영상
Gazebo 시뮬레이터 영상
룸바 8대를 가지고 A* 알고리즘을 실행하는 모습을 Gazebo Sim에서 구현하였습니다. 90 Degree 회전을 측정하는 센서의 오차값으로 인해 전달된 명령을 정확하게 수행하지 못하는 한계가 있습니다.
다중 룸바 단일 명령 수행 영상
룸바 2대를 가지고 PDDL 알고리즘을 실행하는 모습을 촬영하였습니다. 서버에서 연산된 PDDL 결과를 룸바에세 전송하였을 때 짧은 명령을 수행할 때에는 90도 회전이 정확하게 수행되는 모습입니다. 하지만 아래 링크의 영상처럼 연속된 명령을 수행하면 90도 회전을 측정하는 자이로 센서의 오차값으로 경계선에서 벗어나는 한계를 가지고 있습니다.
다룸 룸바 연속 명령 수행 영상
룸바 2대를 가지고 PDDL 알고리즘을 실행하는 모습을 촬영하였습니다. 서버에서 연산된 PDDL 결과를 룸바에세 전송하였을 때 짧은 명령을 수행할 때에는 90도 회전이 정확하게 수행되는 모습입니다. 하지만 본 영상처럼 연속된 명령을 수행하면 90도 회전을 측정하는 자이로 센서의 오차값으로 경계선에서 벗어나는 한계를 가지고 있습니다.
프로젝트 Repo
https://github.com/niklasjang/path_planning
개발환경
Ubuntu : 16.04 LTS
ROS version : Kinetic
CMake version : 3.5.1 (minimum_required 2.8.3)
Git/Github
H/W
Raspberry pi 3 Model B
Irobot create 2(https://www.irobot.com/about-irobot/stem/create-2)
통합개발환경
Sublimetext
Success Notice:
감사합니다! ![]()
Leave a comment